Inizia la fase 2 dell’assemblaggio: montare un sistema video a bordo con orientamento comandabile dalla radio.
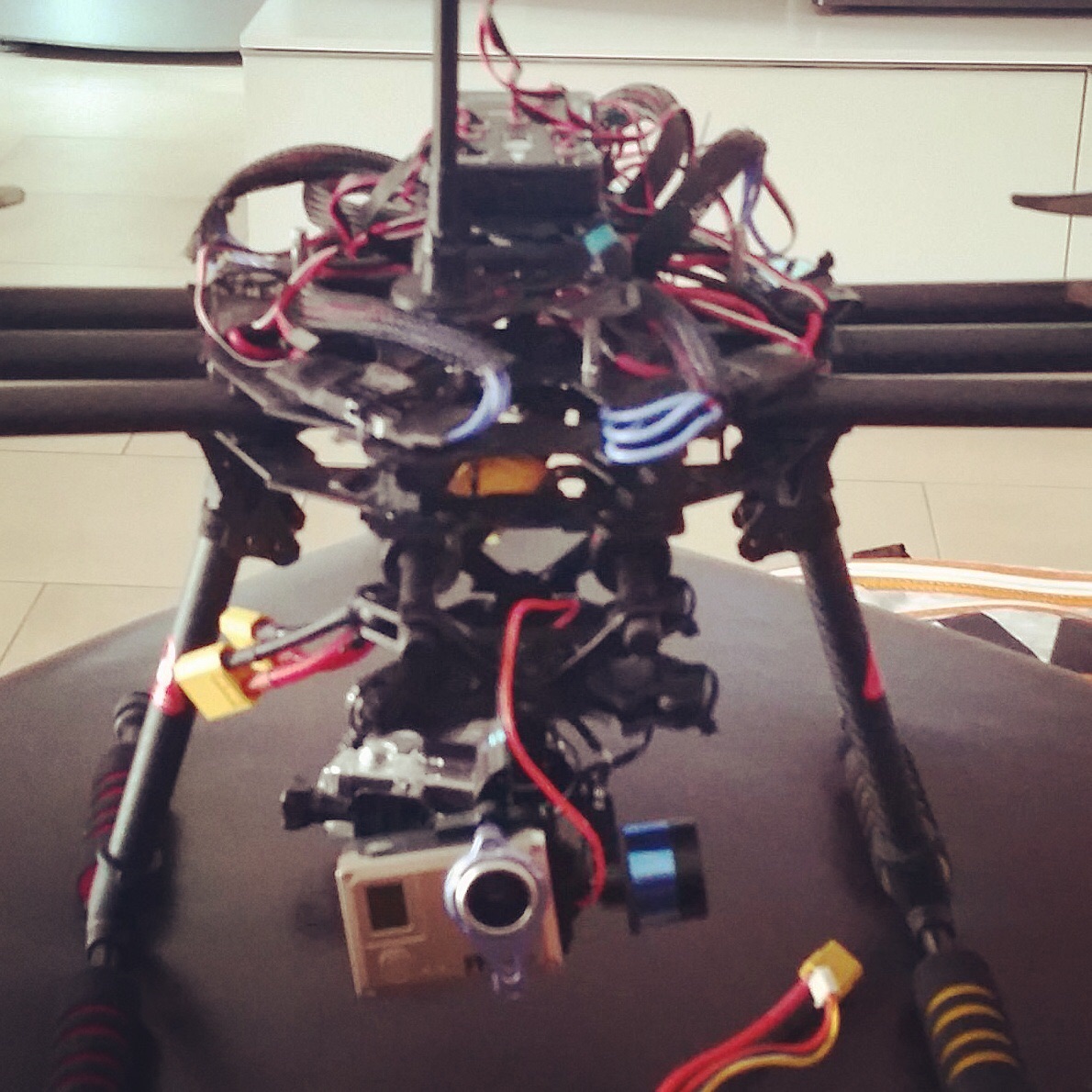
Dopo mesi di documentazione e un viaggetto negli States in visita nei principali store dedicati ai droni, la scelta è ricaduta su un sistema gimbal a due assi (Tarot T-2D) è una action-cam di ultima generazione (GoPro4 Black Edition). Avevo valutato anche l’ultima Hero4 Session, più compatta e leggera rispetto la classica GoPro, resistente all’acqua (non ha bisogno dello scafandro) ma non è adattabile ai vari sistemi gimbal disponibili sul mercato ma sopratutto sto assemblando un mezzo aereo non subacqueo :-).
Avevo immaginato gli States come il paradiso dei droni, mi ero creato delle aspettative da Serie Tv – immaginavo droni a fianco al banco del pane del supermercato – in realtà devo dire è stata una mezza delusione, l’offerta online è decisamente più ampia. Così, di rientro dalla Silicon Valley, ho scalzato la delusione con l’acquisto dell’ultimo minuto presso lo scalo di Londra dove ho preso la GoPro4 Black Edition al corner Dixton e, non contento, collegandomi a una Wi-Fi dell’aeroporto e in attesa del volo di rientro, ho acquistato la gimbal Tarot T-2D dagli amici cinesi di Hobbyking.
L’assemblaggio della gimbal con GoPro non è complicato quanto la fase di messa a bordo dove occorre valutare bene la distribuzione del carico per garantire la bilanciatira del mezzo e la sua efficienza.


La prossima configurazione sarà dedicata al sistema FPV e alla trasmissione Video (TX) con la postazione display (ground station) dotata di doppia ricevente (RX) a 5.8Ghz: non ho ancora deciso se montare una doppia telecamera, nel dubbio quindi meglio prevedere una ricevente adatta all’eventuale implementazione.
Sono curioso di vedere la reazione del mezzo con un payload decisamente superiore (+ 1.5Kg) rispetto alla configurazione già collaudata in volo, per questo motivo sacrificherò una action-cam low cost per limitare i danni in caso di crash 🙂
… Stay tuned …