Un passo fondamentale nella configurazione del drone è la simulazione d’efficienza data dai singoli parametri di ogni componente montato a bordo. A seconda della destinazione d’uso del drone si può ottenere una configurazione con caratteristiche premianti in potenza (maggiore capacità di carico, minore velocità = adatto per fotoriprese aeree) anzichè velocità (minore capacità di carico, maggiore velocità = adatto per FPV/racing).
L’assorbimento degli ampere da parte dei motori (oramai di tipo brushless) varia a seconda dell’elica e della batteria abbinata. Per evitare di fondere il motore/esc è necessario scegliere la corretta combinazione LiPo/motore/eliche con un assorbimento massimo accettabile per motore/esc.
Da notare che il brushless outrunner – motori tipicamente utilizzati nei multicotteri – cercherà sempre di far girare l’elica anche se ha dimensioni troppo grandi per lui, generando un assorbimento di corrente troppo elevato fino a bruciarsi o bruciare il regolatore di velocità ESC.
La scelta di un motore con caratteristiche sovrastimate per la configurazione dell’aeromodello porta ad uno spreco di corrente che si ripercuote sull’efficienza dell’elettronica in generale.
Quanti RPM compie il motore ?
Un parametro caratterizzante dei motori è dato dal numero di giri per ogni volt (unità misura kv). Quindi, un motore da 380kv abbinato a una LiPo a 6 celle (22,2 V) effettua più di 8400 RPM ovvero giri al minuto (Rotations Per Minute – ndr).
RPM = kv * V
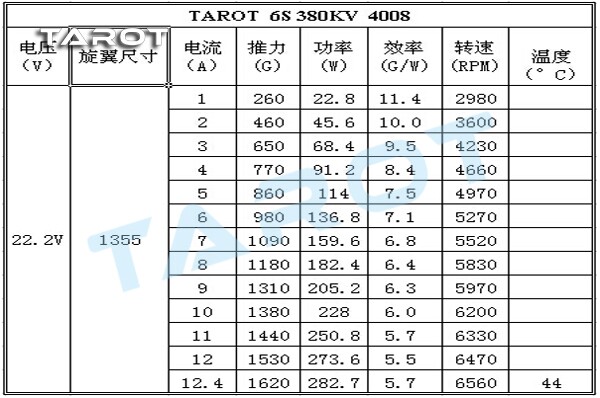
Solitamente ogni motore è accompagnato da una tabella di assorbimento dove vengono riportati i valori a seconda dell’elica associata e pacco batteria associato. Uso il condizionale perchè durante la fase di ricerca mi sono imbattuto in motori che non venivano accompagnati da questa importante tabella di riferimento!!! Grrrr 🙁
I parametri riportati sono:
- V – voltaggio generato dalla LiPo (3,7V ogni cella): 22,2V indica l’utilizzo di una 6 celle;
- Eliche (Props) – caratteristiche dell’elica espresse in diametro e passo: 1355 indica una 13 x 55;
- Corrente (A) – corrente assorbita espressa in Ampere;
- Pull (G) – espresso in Grammi indica il peso sollevato per ogni motore;
- Potenza (W) – potenza sprigionata espressa in Watt;
- Efficienza (G/W) – potenza ottenuta per ogni Volt;
- RPM – esprime il numero di giri al minuto effettivi ottenuti con l’elica associata;
- Riscaldamento (º C) – calore generato dal motore espresso in gradi centigradi;
La tabella riportata di seguito riporta le caratteristiche per il motore selezionato nella configurazione elencata nel precedente post, Tarot 6s 380kv abbinato a un pacco batteria LiPo a 6 celle e un’elica 13×55.
Primi calcoli su assorbimento e autonomia
Per comprendere l’efficienza della configurazione scelta ci vengono in aiuto alcuni calcoli che permettono di stimare l’assorbimento di corrente e l’automia della batteria.
Facendo quattro calcoli la configurazione ipotizzata permette di sollevare un drone di circa 10Kg assorbendo 74.400mah. Una configurazione ottimale prevede un hovering a circa metà throttle, in modo tale da avere sufficiente margine di manovra per il volo. Semplificando è possibile stimare un volo sostenuto a velocità nulla e quota costante (hovering) per una massa complessiva fino a 5Kg.
Massa totale sollevata (G) = G * numero rotori
Ulteriore parametro essenziale nella configurazione di un multicottero è dato dal calcolo dell’autonomia in volo sfruttando i rotori a massimi regimi, per la capacità di immagazzinamento della LiPo. Per la configurazione scelta si otterrebbe un’autonomia di 9 minuti abbondanti. Il calcolo è puramente indicativo anche perchè il volo a manetta per tutto il tempo non credo sia tipico 🙂 Quindi, a spanne, è possibile stimare un’autonomia per un volo misto di circa 15/20 minuti – del tutto accettabile per la destinazione d’uso di questa configurazione.
Autonomia = (capacità mAh LiPo * 60) / Tot Assorbimento
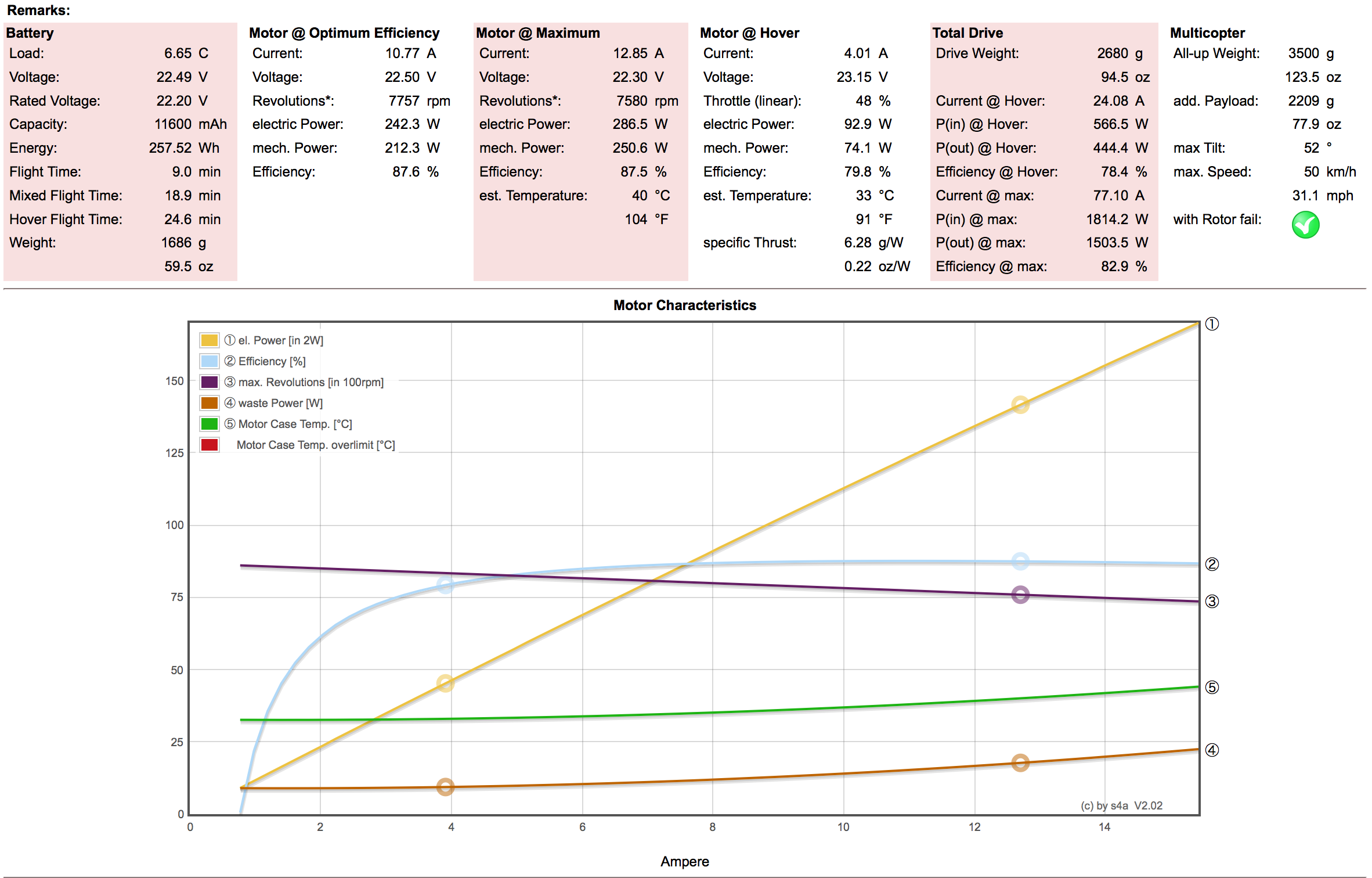
Pe fortuna esistono dei configuratori che permettono di stimare con più precisione l’efficienza del multicottero. Con questi sistemi è sufficiente inserire i parametri di assorbimento dei singoli componenti, le caratteristiche delle eliche con passo e diametro, dettagli degli ESC e del pacco batteria oltre al carico complessivo del mezzo per ottenere una proiezione ben più precisa e completa con una approsimazione del 10%.
Tra i vari strumenti individuati in rete, xcopterCalc (Multicopter Calculator) che si trova all’indirizzo www.ecalch.ch risulta essere tra i più affidabili. Di seguito riporto la proiezione ottenuta con la configurazione scelta. Tale setup è sufficiente e compatibile anche per sopperire all’eventuale fail di un motore – ammesso che il drone abbia una buona bilanciatura. Diciamo che non vorrei provarlo, ma è sempre bene prevedere una buona procedura di emergenza in caso di guasto 😉 ed essendo il frame Tarot FY690s un esacottero sarebbe un peccato non sfruttare la ridondanza dei rotori.