Dji ha annunciato le scorse settimane l’uscita di un nuovo prodotto, la “matrice”: sarà disponibile a breve ed è stato creato per il nuovo mercato di sviluppatori che intendono produrre nuovi scenari di Business per l’utilizzo dei Droni.
Dji quindi si mostra interessata a continuare a rilasciare nuove SDK e a consentire un approccio open di integrazione all’HW.
Dopo aver testato l’elettronica, inizia la vera fase di assemblaggio. Sembrava più semplice posizionare i vari componenti sul frame ma grazie a qualche personalizzazione ottenuta con la stampa 3D di AStratiConcreti (rif. Facebook https://www.facebook.com/AStratiConcreti), tutto è stato più semplice.
I progetti, customizzati per Sir-Drone, sono stati tratti dal portale Thingiverse e qui condivido i link diretti:
Passate le specifiche all’amico Vik di AStratiConcreti che ha ultimato i progetti con un l’esperienza grafico/artististica, et voilà les jeux sont faits 🙂 .
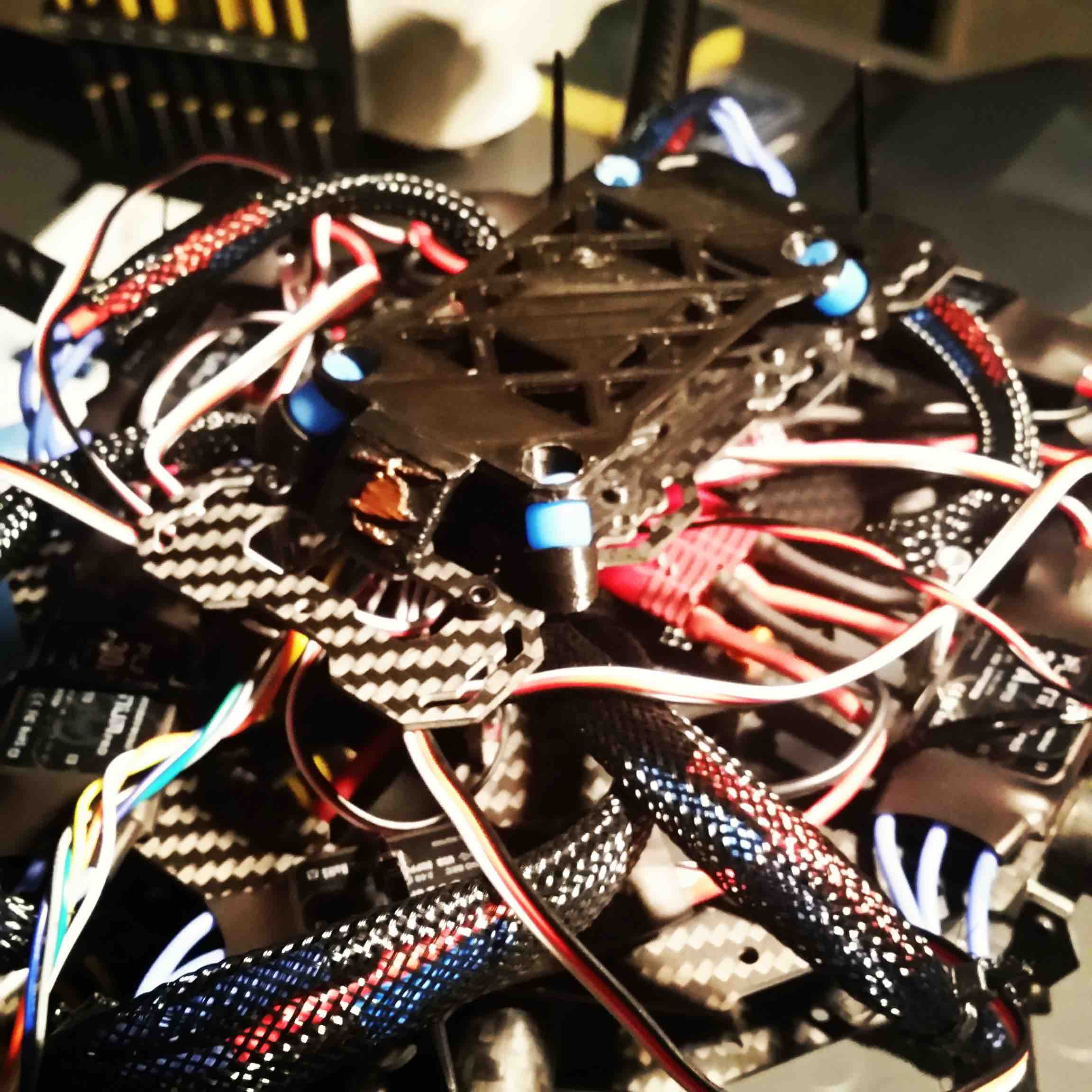
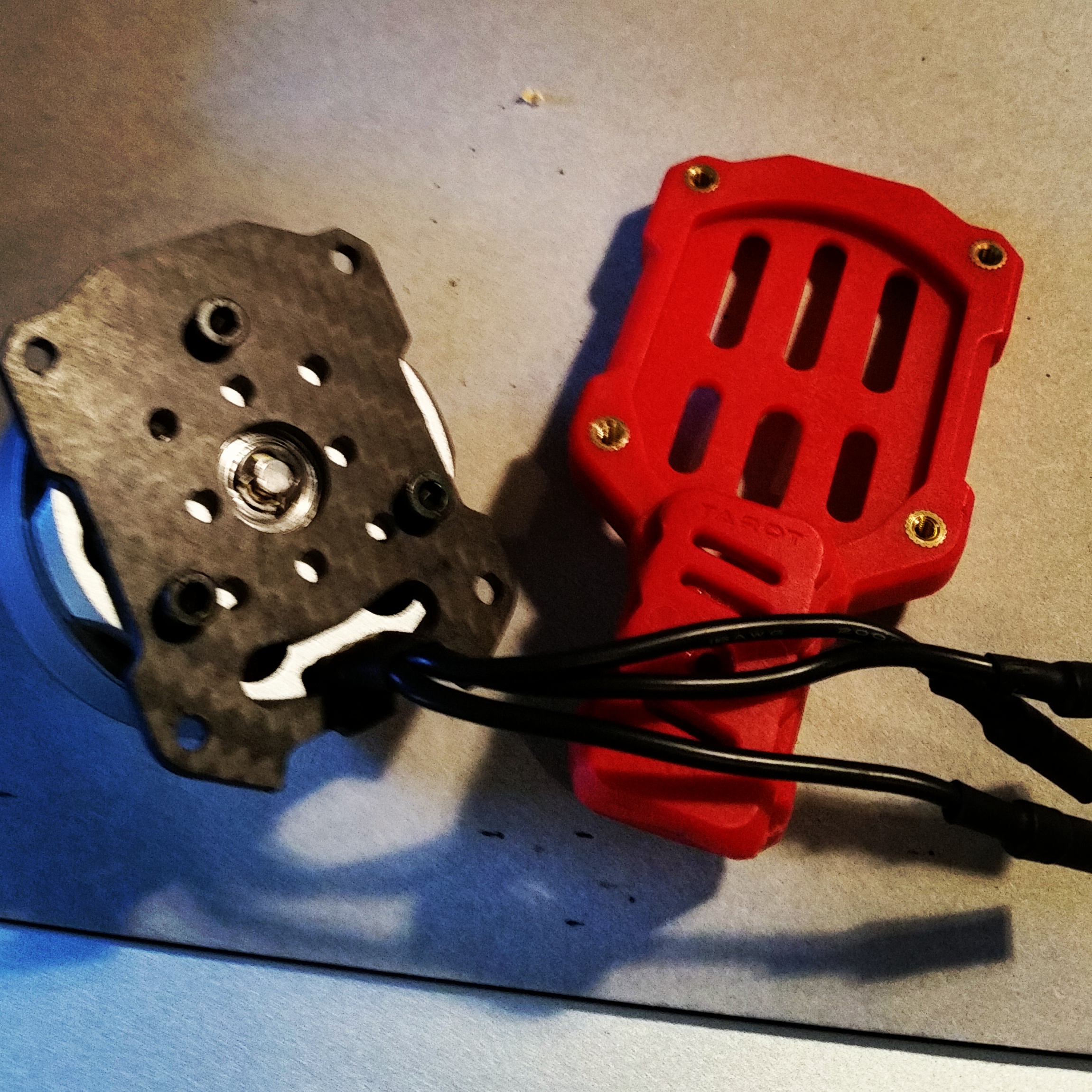
Qui alcuni dettagli dell’applicazione sul frame dell’antivibrazioni con i cuscinetti assorbi vibrazioni in azzurro.
Da notare la customizzazione con il logo in evidenza 😉
Dopo diverse ore di assemblaggio, ecco il risultato all-in-one.
Tutto pronto per la fase di test dei motori. Calibrati gli accellerometri, bindata e calibrata la radio (Turnigy 9XR Pro, con modulo Telemetria e ricevente D8R-II della FrSky) con i 4 canali necessari e sufficienti per le prime prove, azionato l’accelleratore (throttle – ndr) e … FUNZIONA !
Prossimi step:
Calibrazione ESC (Range Throttle) in modo da allineare la partenza dei 6 motori;
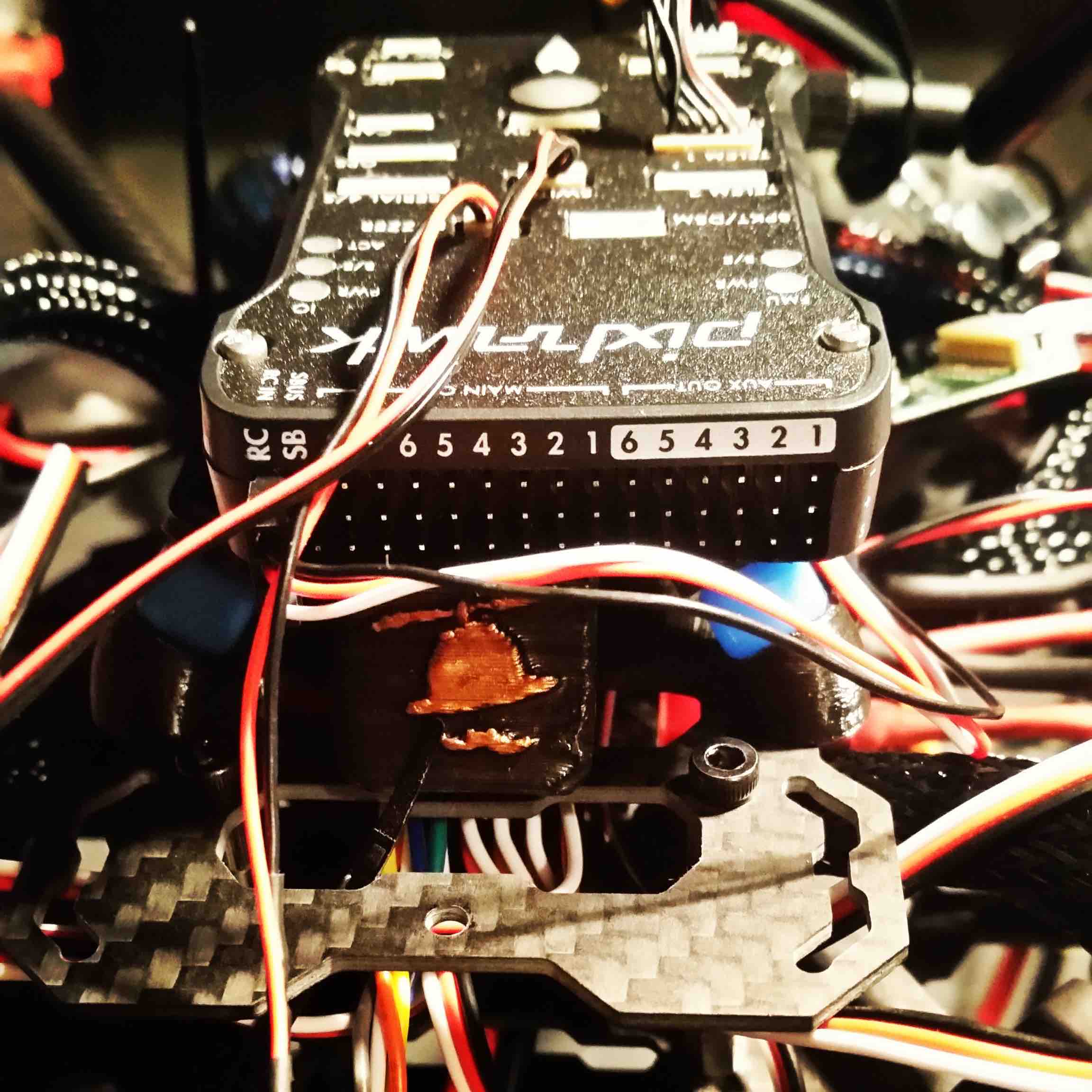
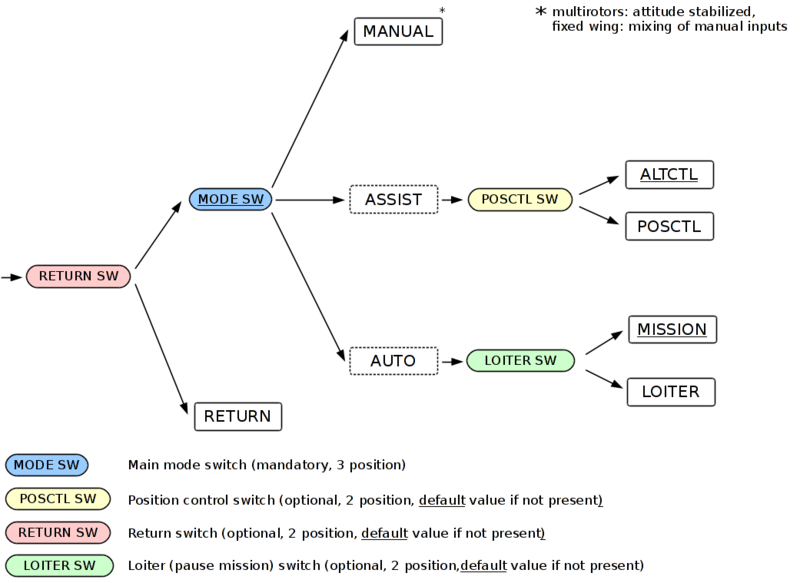
Configurazione canali aggiuntivi della radio per gestire le varie modalità di volo (vedi immagine di seguito) come spiegato sul sito della Pixhawk
La fase di collaudo è iniziata.
Conclusa la saldatura dei vari plug, cavi etc è iniziata la fase di collaudo della componentistica elettronica. Dopo aver alimentato la 3DR Pixhawk, connesso il buzzer (cicalino – ndr), il modulo per la telemetria, effettuato il bind con la radio attraverso il modulo PPM fornito dalla 3DR, collegati i 6 motori ai rispettivi ESC alimentati attraverso la PDB che a cascata riceve l’alimentazione attraverso il Power Module e il pacco batterie LiPo (rif. configurazione drone), ho effettuato i primi test attraverso il programma APM Planner 2.0.
Risultato: test successfull !
Il video riprende la fase di test di un motore. Concentratevi sull’audio e non sul video 🙂
Collaudo riuscito! E’ arrivato il momento di assemblare.
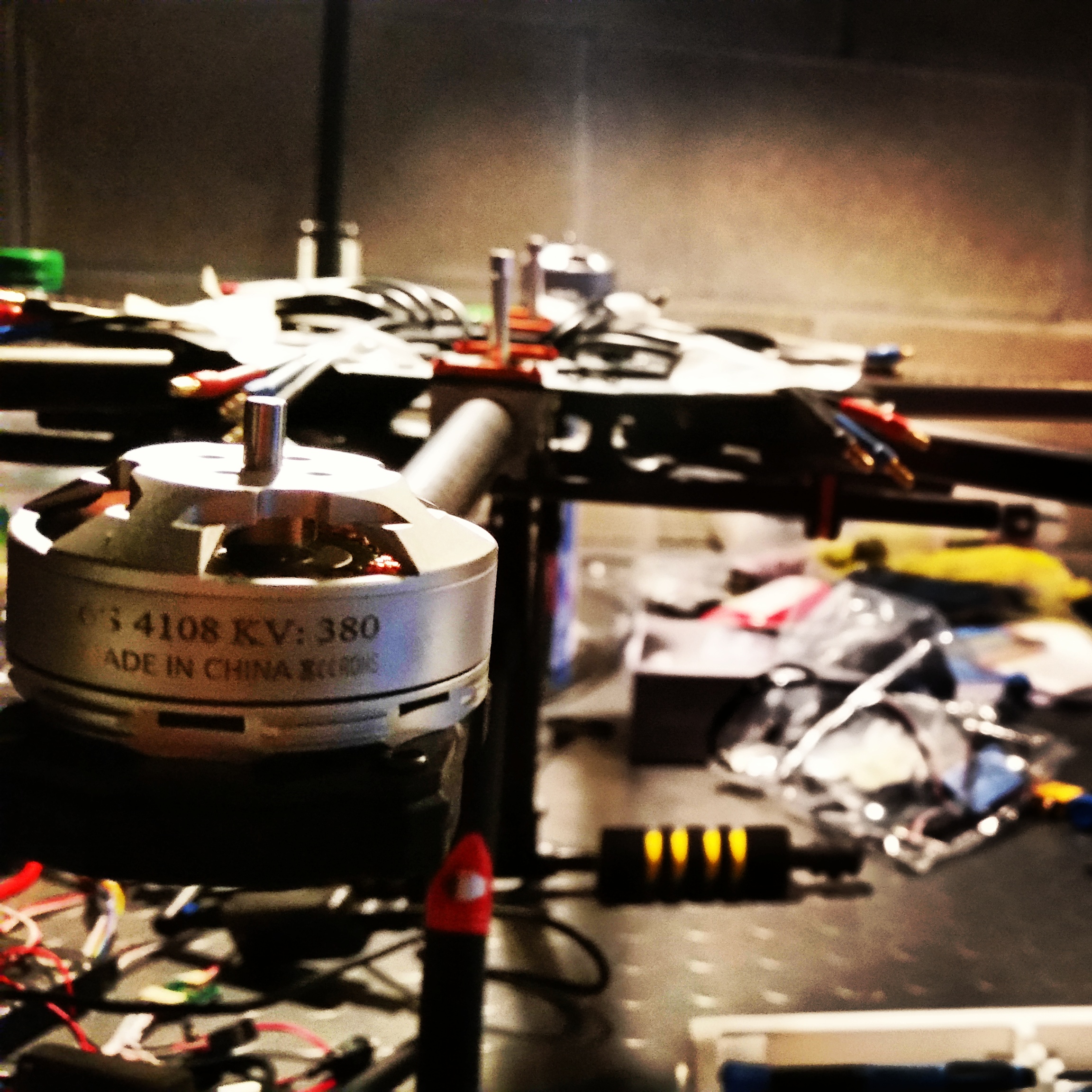
Il mostro inizia a prendere forma. Tutti i componenti prendono posto sul frame Tarot FY690s, gioco non facile dal momento in cui gli spazi – ahimè – sono piuttosto sacrificati!
La fase di cablaggio continua.
Tutti connettori sono stati saldati. I motori sono stati montati sui propri supporti, agganciati attraverso le 3 viti (M3) equidistanti dal centro motore a 32mm.Tutte le viti dei rotori sono state assicurate con il liquido frenafiletti.
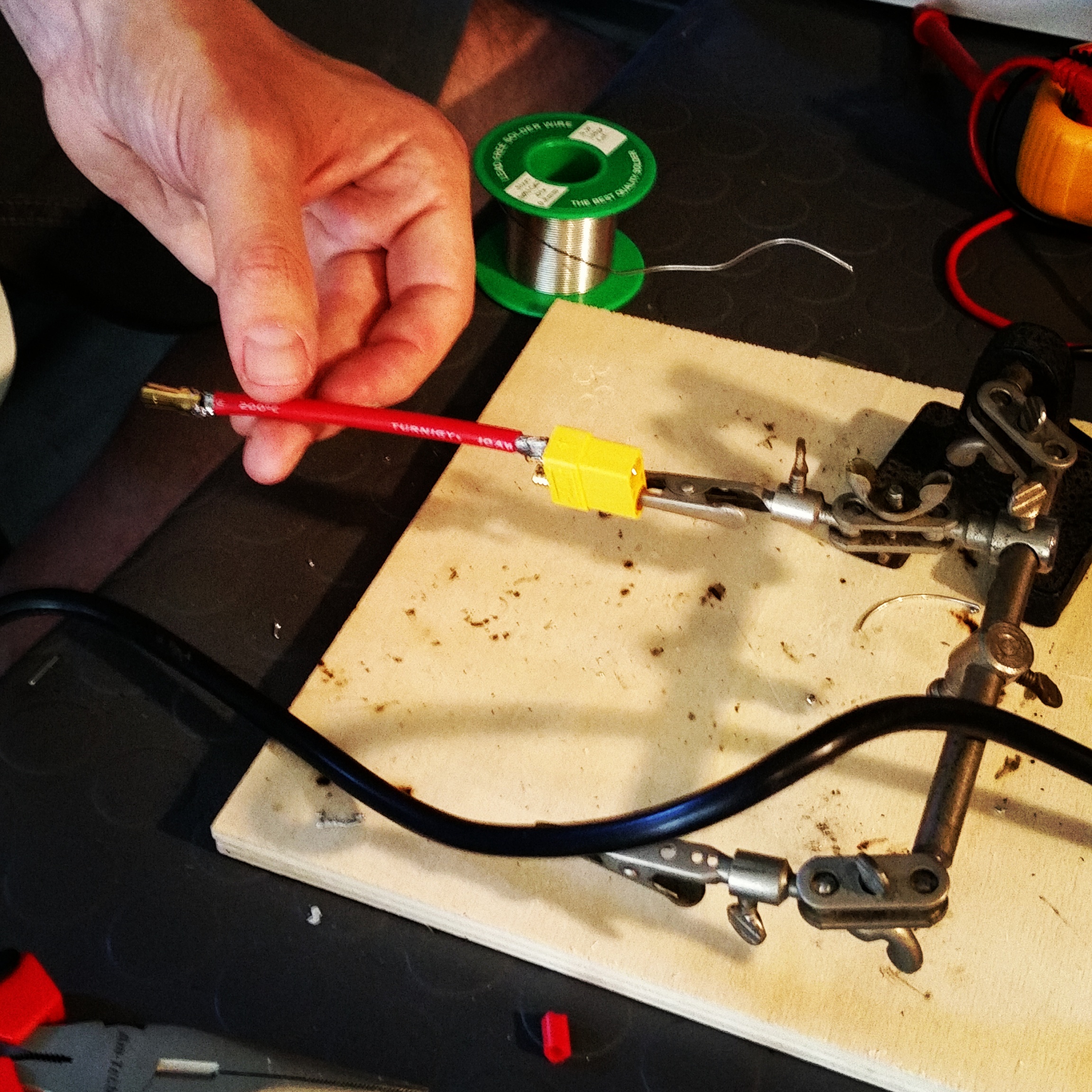
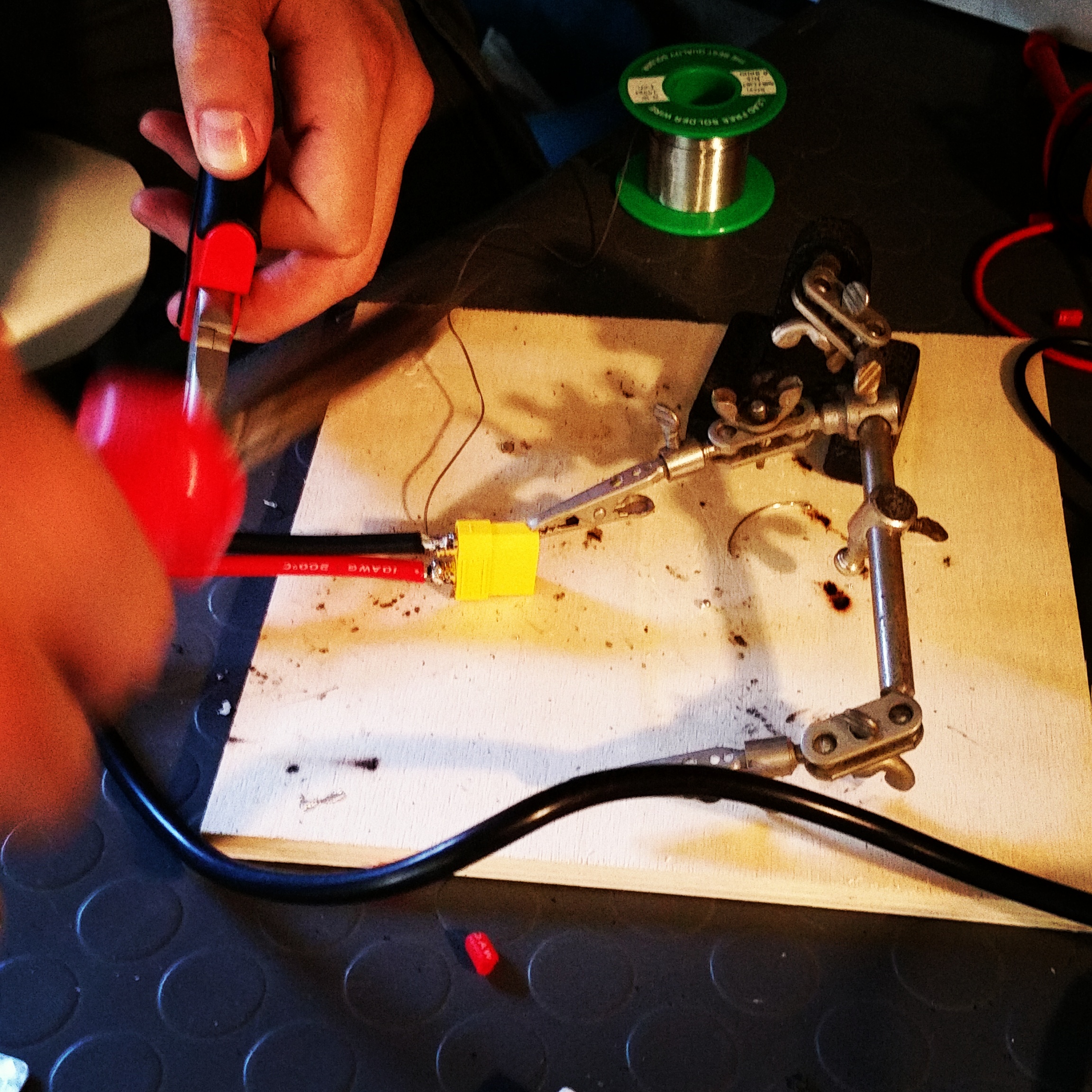
Dopo aver saldato i numerosi plug da 3,5”, arriva la parte più complessa: saldare i T-PLUG e i cavi di alimentazione ai connettori XT-90 e plug da 5”.
Un breve video che riprende la saldatura dei connettori T-PLUG agli ESC.
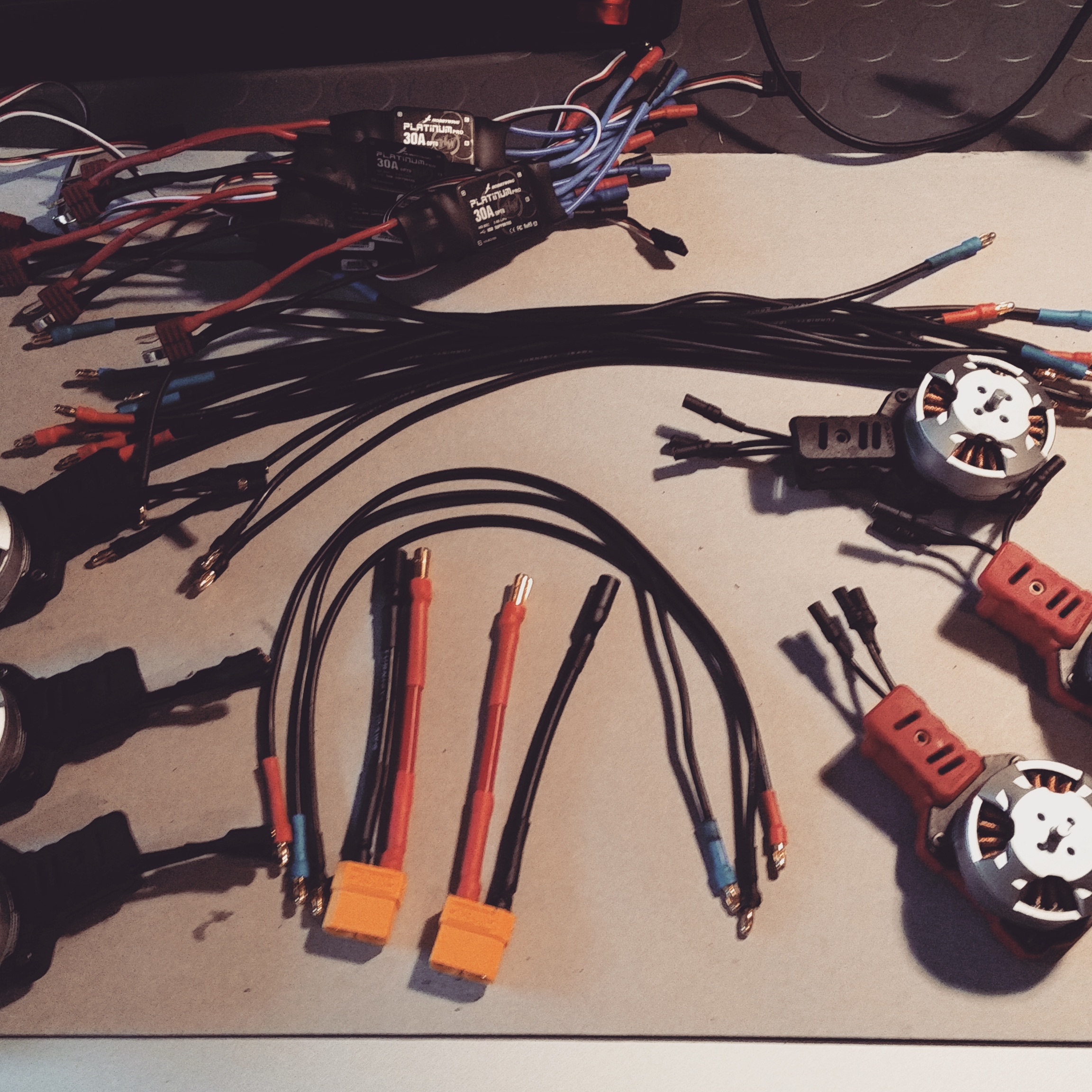
Ed ecco il lavoro compleatato.
Presto il collaudo e poi l’assemblaggio sul frame Tarot FY690s e il primo volo di test !
Una bella Domenica di Maggio nello scenario spettacolare offerto dai colli dell’oltrepò pavese, sole, clima perfetto, nemmeno una nube. vento praticamente assente, ok si vola con il DJI Phantom 2 Vision+ per riprendere questo fantastico paesaggio dall’alto.
La ripresa non sarebbe stata perfetta se non ci fosse stato un piccolo inconveniente che ha reso il tutto ancora più spettacolare: all’improvviso il drone viene inglobato in una misteriosa nuvola scura e difforme, era un simpatico quanto incazzato sciame d’api :-). Solo dopo aver attivato il fail-safe, arrivato a circa 40mt di altitudine, le api hanno abbandonato la preda!