Dopo aver testato l’elettronica, inizia la vera fase di assemblaggio. Sembrava più semplice posizionare i vari componenti sul frame ma grazie a qualche personalizzazione ottenuta con la stampa 3D di AStratiConcreti (rif. Facebook https://www.facebook.com/AStratiConcreti), tutto è stato più semplice.
I progetti, customizzati per Sir-Drone, sono stati tratti dal portale Thingiverse e qui condivido i link diretti:
- supporto antivibrazioni per la Pixhawk
- supporto GPS/Bussola
- supporto porta switch, porta esterna USB e led ausiliario
Passate le specifiche all’amico Vik di AStratiConcreti che ha ultimato i progetti con un l’esperienza grafico/artististica, et voilà les jeux sont faits 🙂
.

Qui alcuni dettagli dell’applicazione sul frame dell’antivibrazioni con i cuscinetti assorbi vibrazioni in azzurro.
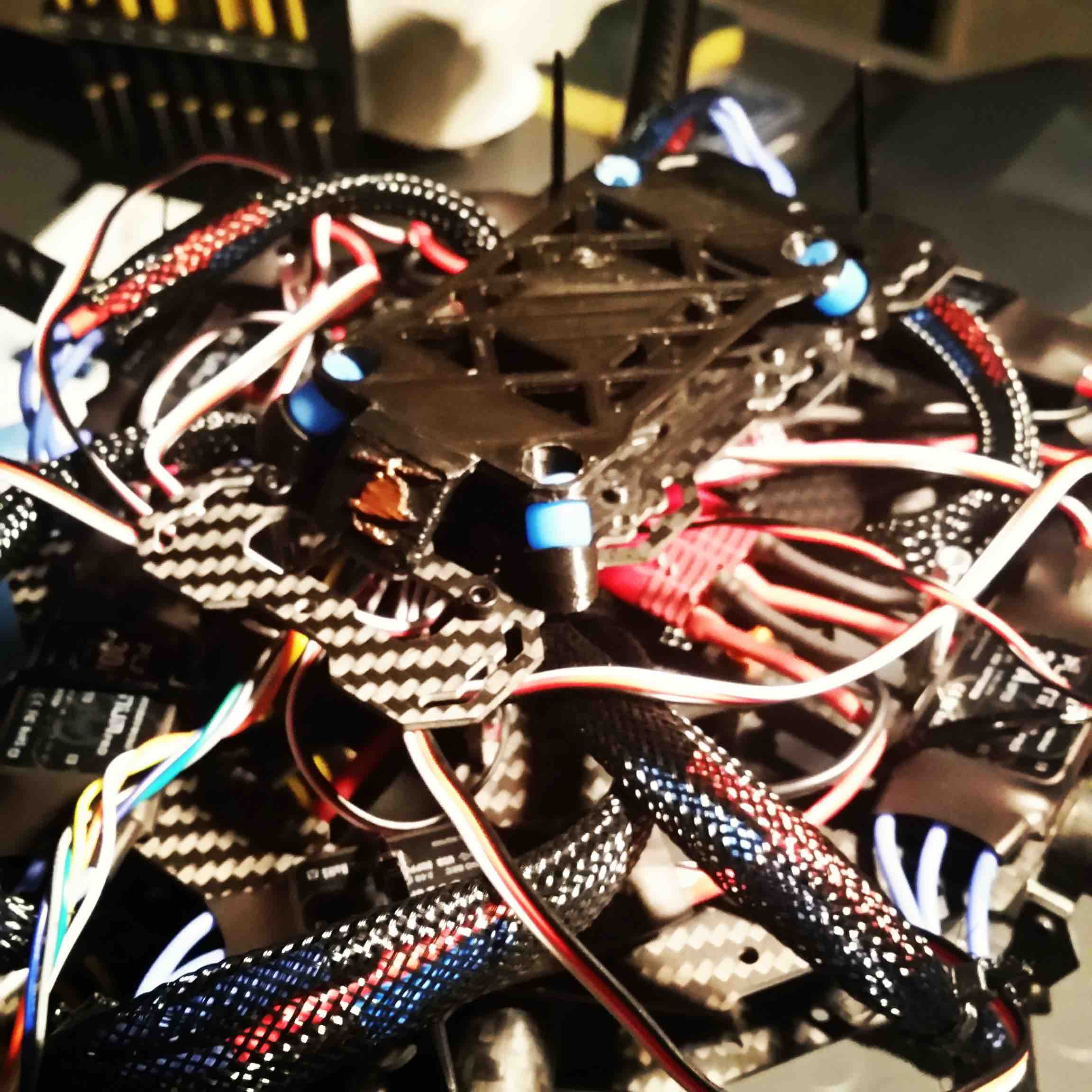
Da notare la customizzazione con il logo in evidenza 😉
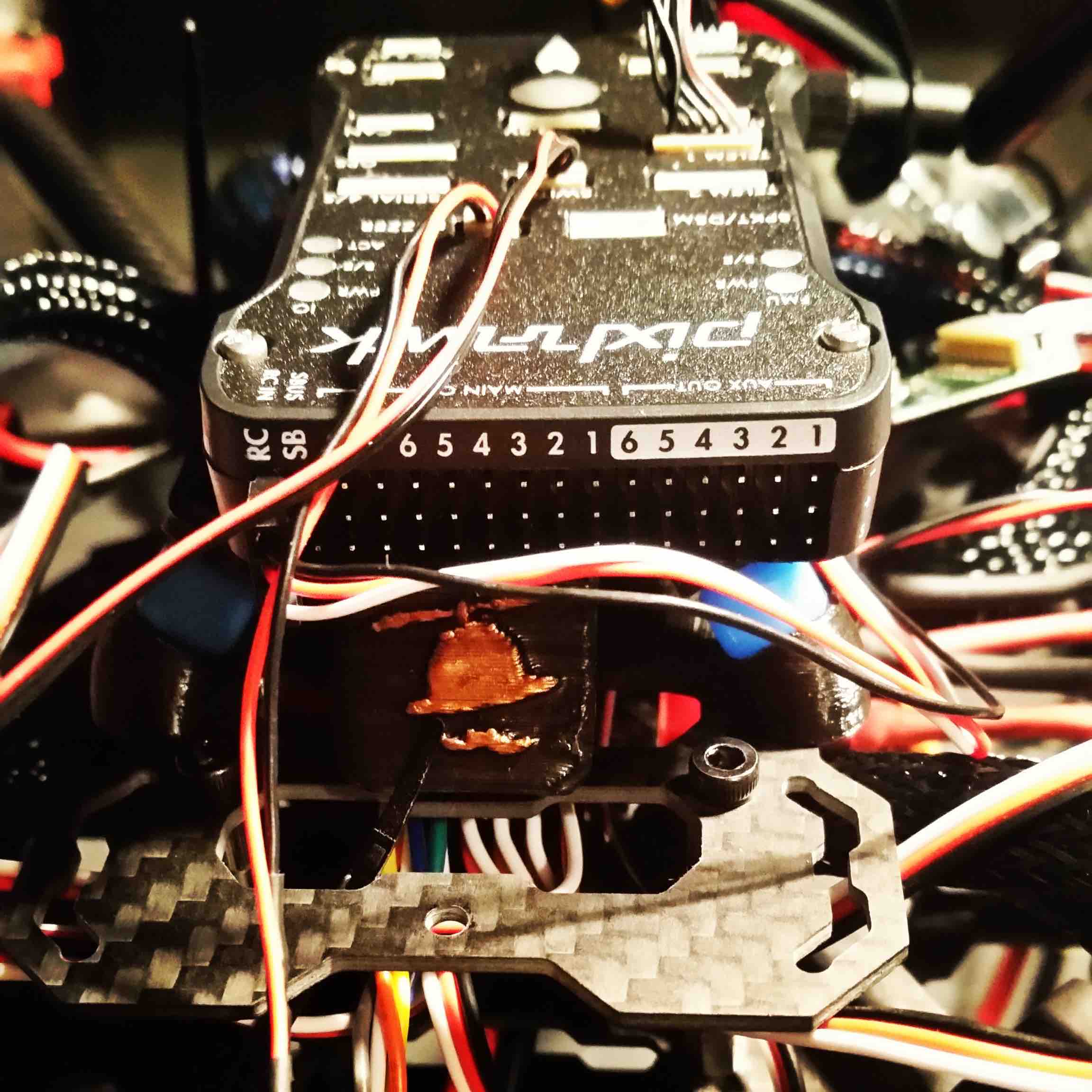 Dopo diverse ore di assemblaggio, ecco il risultato all-in-one.
Dopo diverse ore di assemblaggio, ecco il risultato all-in-one.

Tutto pronto per la fase di test dei motori. Calibrati gli accellerometri, bindata e calibrata la radio (Turnigy 9XR Pro, con modulo Telemetria e ricevente D8R-II della FrSky) con i 4 canali necessari e sufficienti per le prime prove, azionato l’accelleratore (throttle – ndr) e … FUNZIONA !
Prossimi step:
- Calibrazione ESC (Range Throttle) in modo da allineare la partenza dei 6 motori;
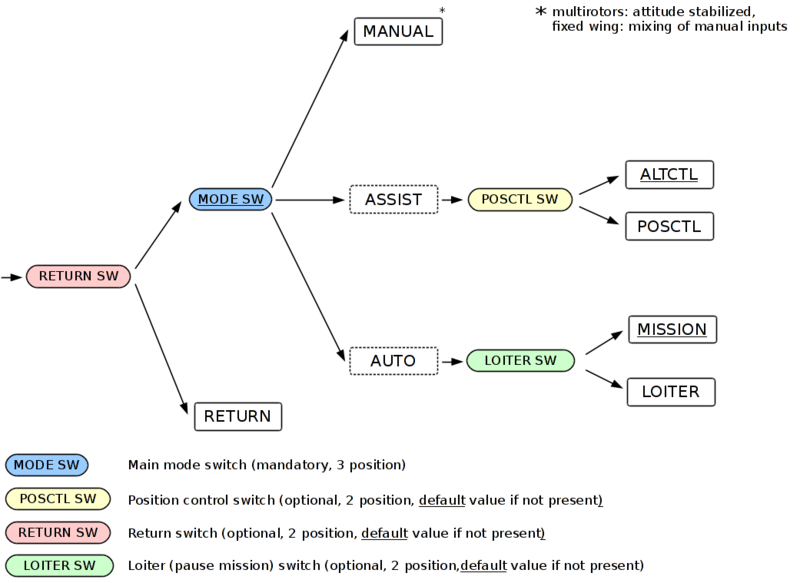
- Configurazione canali aggiuntivi della radio per gestire le varie modalità di volo (vedi immagine di seguito) come spiegato sul sito della Pixhawk