In barba agli increduli siamo arrivati al tanto atteso momento del primo volo!
A parte un’errata configurazione della radio individuata in fase di decollo e corretta prima della catastrofe (consiglio vivamente una bella check-list oltre a alle norme di base), il primo stacco da terra è andato bene!
Fiero del mio fantastico ARRIS X-SPEED classe 250 mi accingevo al mio consueto volo infrasettimanale quando, dopo il decollo e il giro nel campo di grano accade l’impensabile:un BackFlip improvviso e derivante schianto al suolo!!!
Fortunatame tutto ancora integro, il grano alto ha attutito la caduta (solo i props da cambiare…) .
L’accaduto mi ha fatto riflettere:
Come abilitare un minimo di failsafe su CC3D:CC3D Failsafe
Come evitare di fondere le eliche sul piatto motore per cercare il drone in mezzo al campo di grano… LOL:CC3D Alarm Buzz
Chiudo immedesimandomi un po’ in Nico Cereghin: “Campo isolato lontano da persone e cose, volo a vista nei limiti ENAC e PRUDENZA, SEMPRE!!!”.
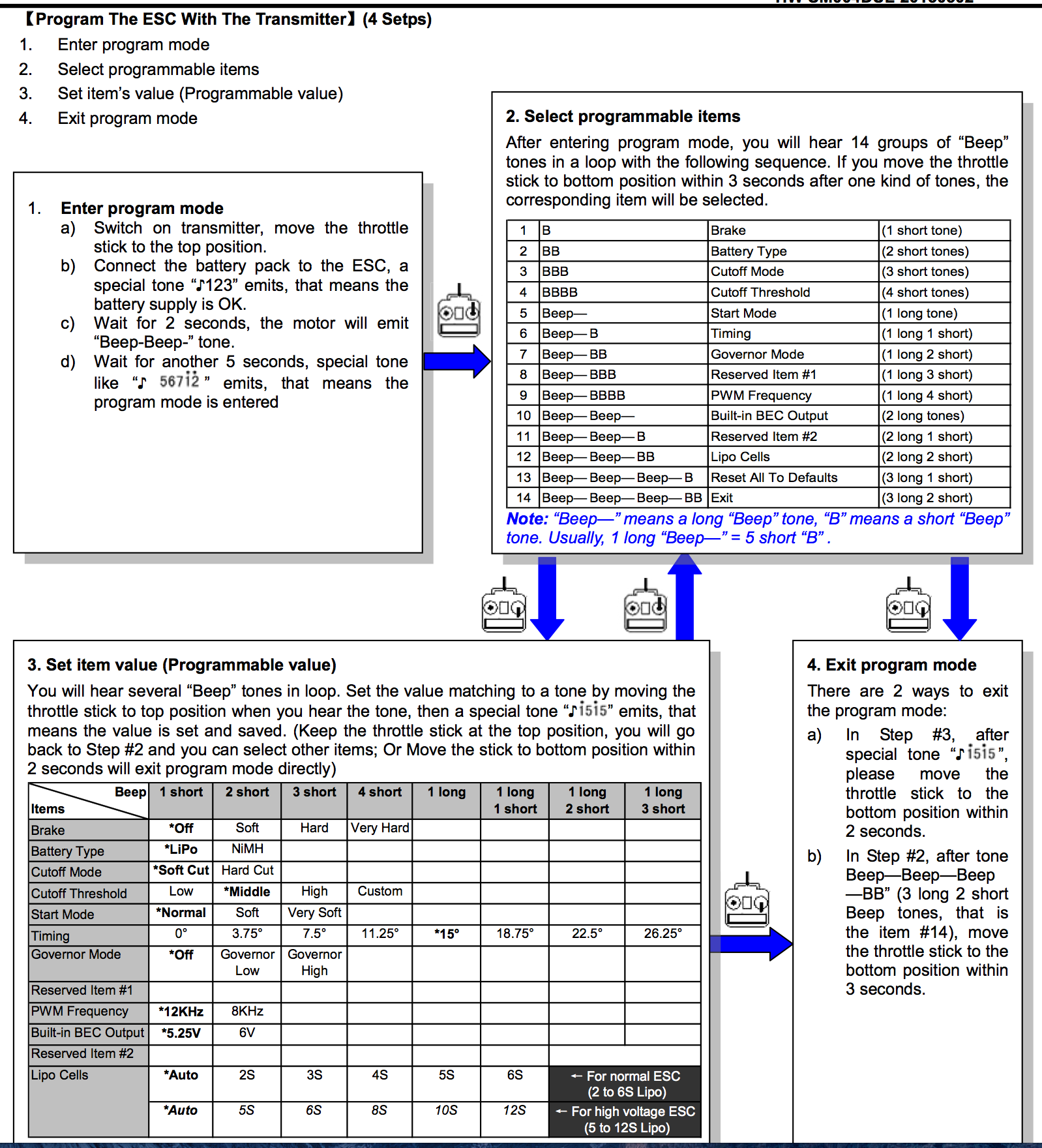
Sincronizzazione degli ESC (Hobbywing 30A Opto Platinum) avvenuta.
Ora i motori sono allineati e non ci sono più ritardi nella partenza a parità di accellerazione (throttle).
Da segnalare: la procedura riportata nel manuale degli ESC (vd. Throttle Range Setting) non è corretta. Non bisogna attendere l’emissione del “music tone” ma occorre intervenire al primo “beep”.
Difatti, il “music tone” indica l’accesso alla modalità di configurazione (programming mode – ndr). E’ facile riscontrare lo stesso problema negli ESC che prevedono la modalità “programming mode” mantenendo il throttle al massimo all’accensione della trasmittente.
Ultima considerazione, come suggerito su ArduPilot (rif. http://copter.ardupilot.com/wiki/initial-setup/esc-motor/) tutti gli ESC sono stati impostati con i parametri consigliati:
Brake: OFF
Battery Type: Ni-xx(NiMH or NiCd) (even if you’re using Li-po batteries this setting reduces the likelihood that the ESC’s low voltage detection will turn off the motors)
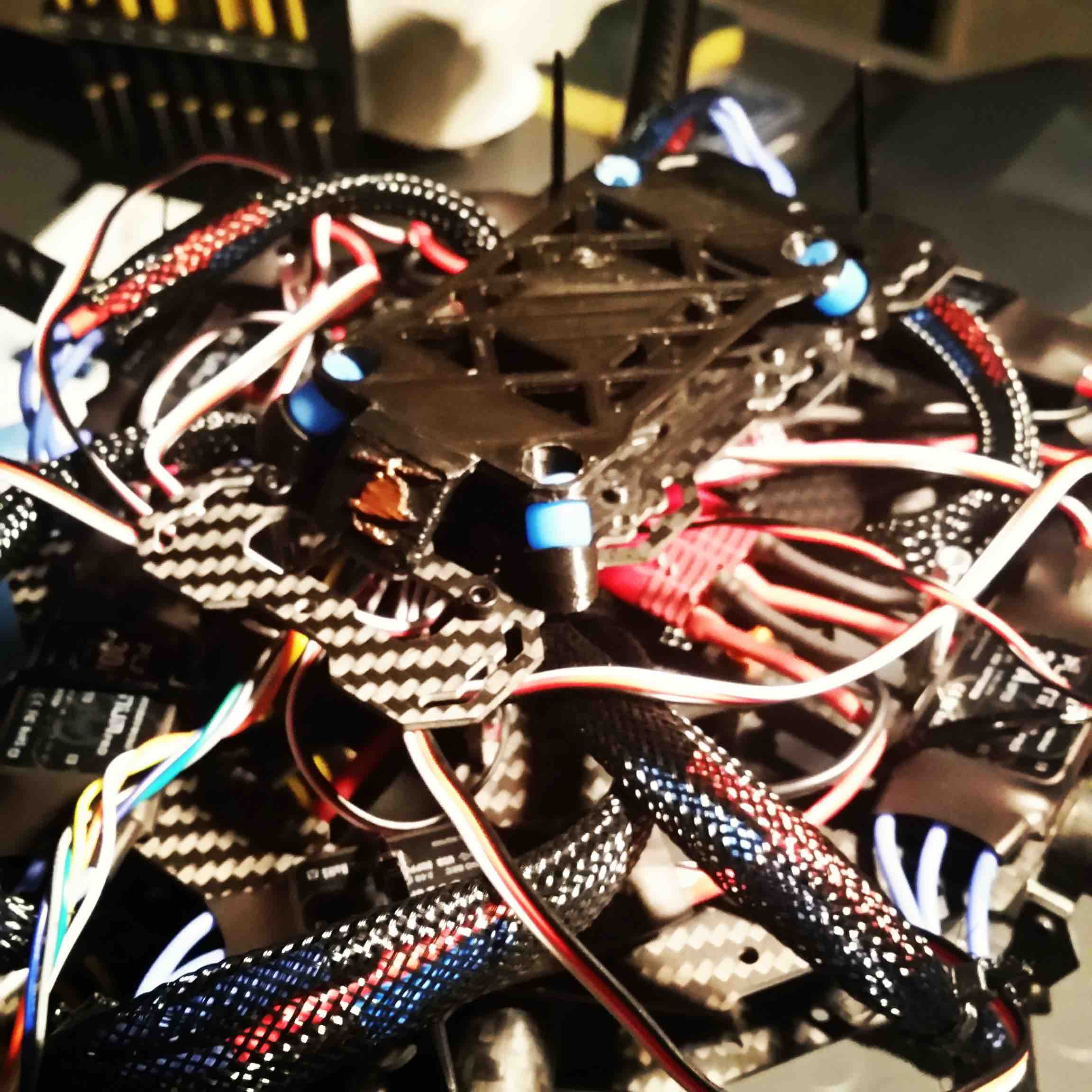
Dopo aver testato l’elettronica, inizia la vera fase di assemblaggio. Sembrava più semplice posizionare i vari componenti sul frame ma grazie a qualche personalizzazione ottenuta con la stampa 3D di AStratiConcreti (rif. Facebook https://www.facebook.com/AStratiConcreti), tutto è stato più semplice.
I progetti, customizzati per Sir-Drone, sono stati tratti dal portale Thingiverse e qui condivido i link diretti:
Passate le specifiche all’amico Vik di AStratiConcreti che ha ultimato i progetti con un l’esperienza grafico/artististica, et voilà les jeux sont faits 🙂 .
Qui alcuni dettagli dell’applicazione sul frame dell’antivibrazioni con i cuscinetti assorbi vibrazioni in azzurro.
Da notare la customizzazione con il logo in evidenza 😉
Dopo diverse ore di assemblaggio, ecco il risultato all-in-one.
Tutto pronto per la fase di test dei motori. Calibrati gli accellerometri, bindata e calibrata la radio (Turnigy 9XR Pro, con modulo Telemetria e ricevente D8R-II della FrSky) con i 4 canali necessari e sufficienti per le prime prove, azionato l’accelleratore (throttle – ndr) e … FUNZIONA !
Prossimi step:
Calibrazione ESC (Range Throttle) in modo da allineare la partenza dei 6 motori;
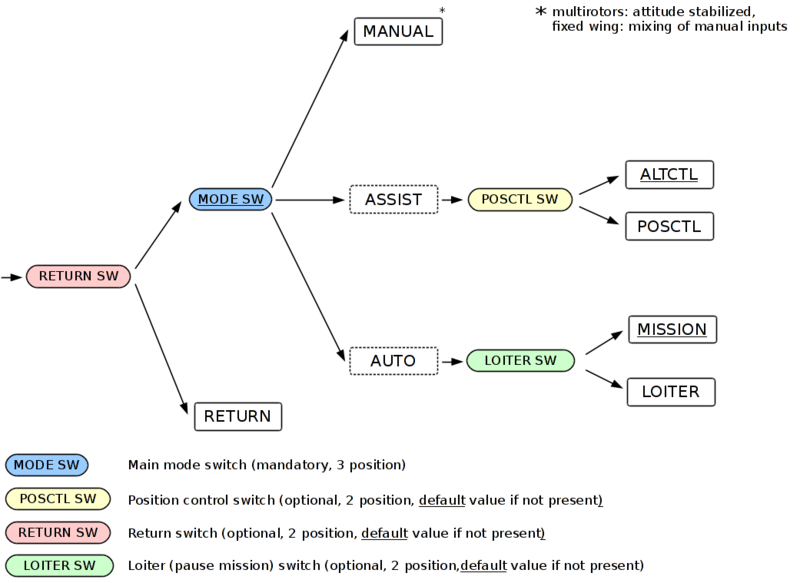
Configurazione canali aggiuntivi della radio per gestire le varie modalità di volo (vedi immagine di seguito) come spiegato sul sito della Pixhawk
La fase di collaudo è iniziata.
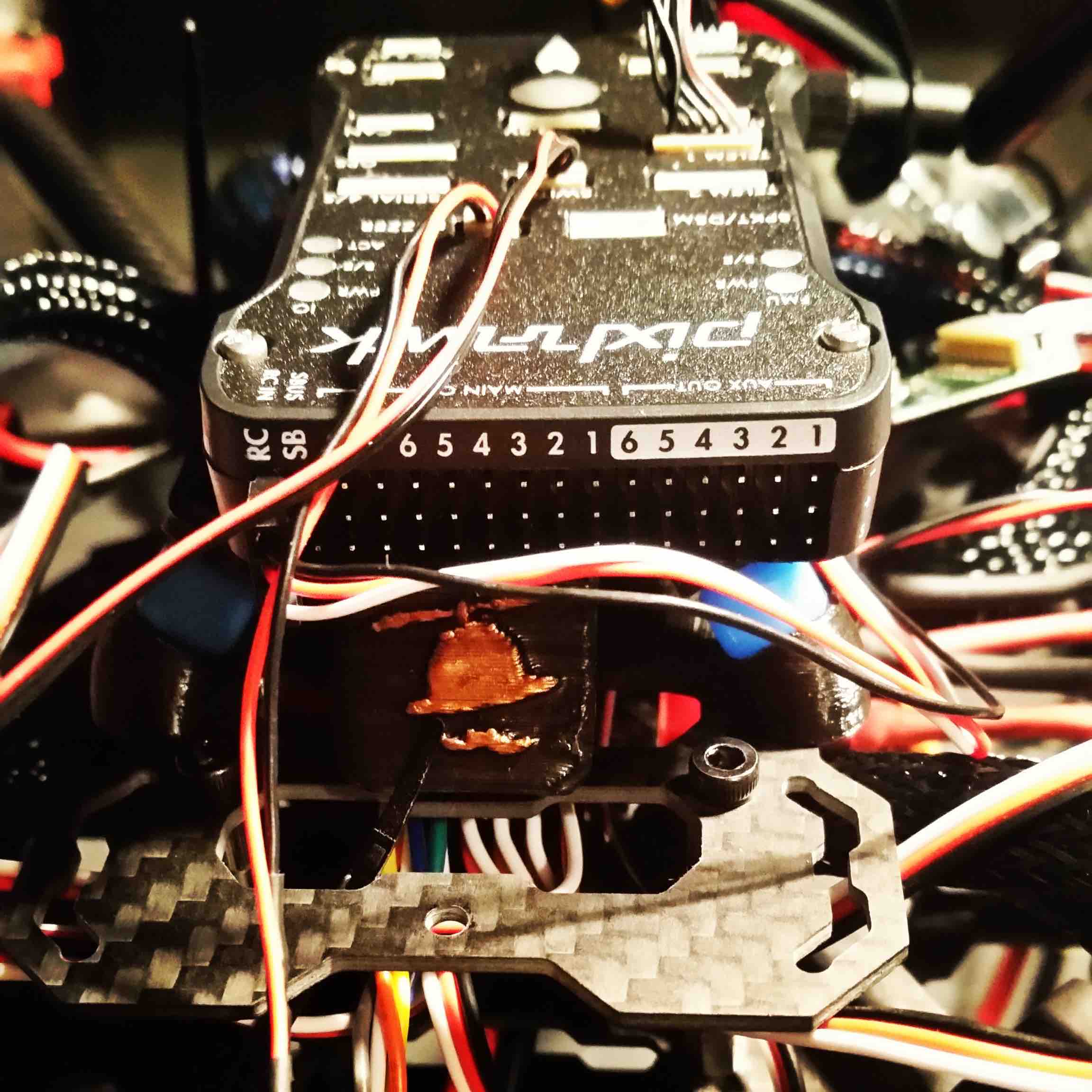
Conclusa la saldatura dei vari plug, cavi etc è iniziata la fase di collaudo della componentistica elettronica. Dopo aver alimentato la 3DR Pixhawk, connesso il buzzer (cicalino – ndr), il modulo per la telemetria, effettuato il bind con la radio attraverso il modulo PPM fornito dalla 3DR, collegati i 6 motori ai rispettivi ESC alimentati attraverso la PDB che a cascata riceve l’alimentazione attraverso il Power Module e il pacco batterie LiPo (rif. configurazione drone), ho effettuato i primi test attraverso il programma APM Planner 2.0.
Risultato: test successfull !
Il video riprende la fase di test di un motore. Concentratevi sull’audio e non sul video 🙂
Collaudo riuscito! E’ arrivato il momento di assemblare.
Il mostro inizia a prendere forma. Tutti i componenti prendono posto sul frame Tarot FY690s, gioco non facile dal momento in cui gli spazi – ahimè – sono piuttosto sacrificati!


 L’avventura è stata documentata nel blog:
L’avventura è stata documentata nel blog: