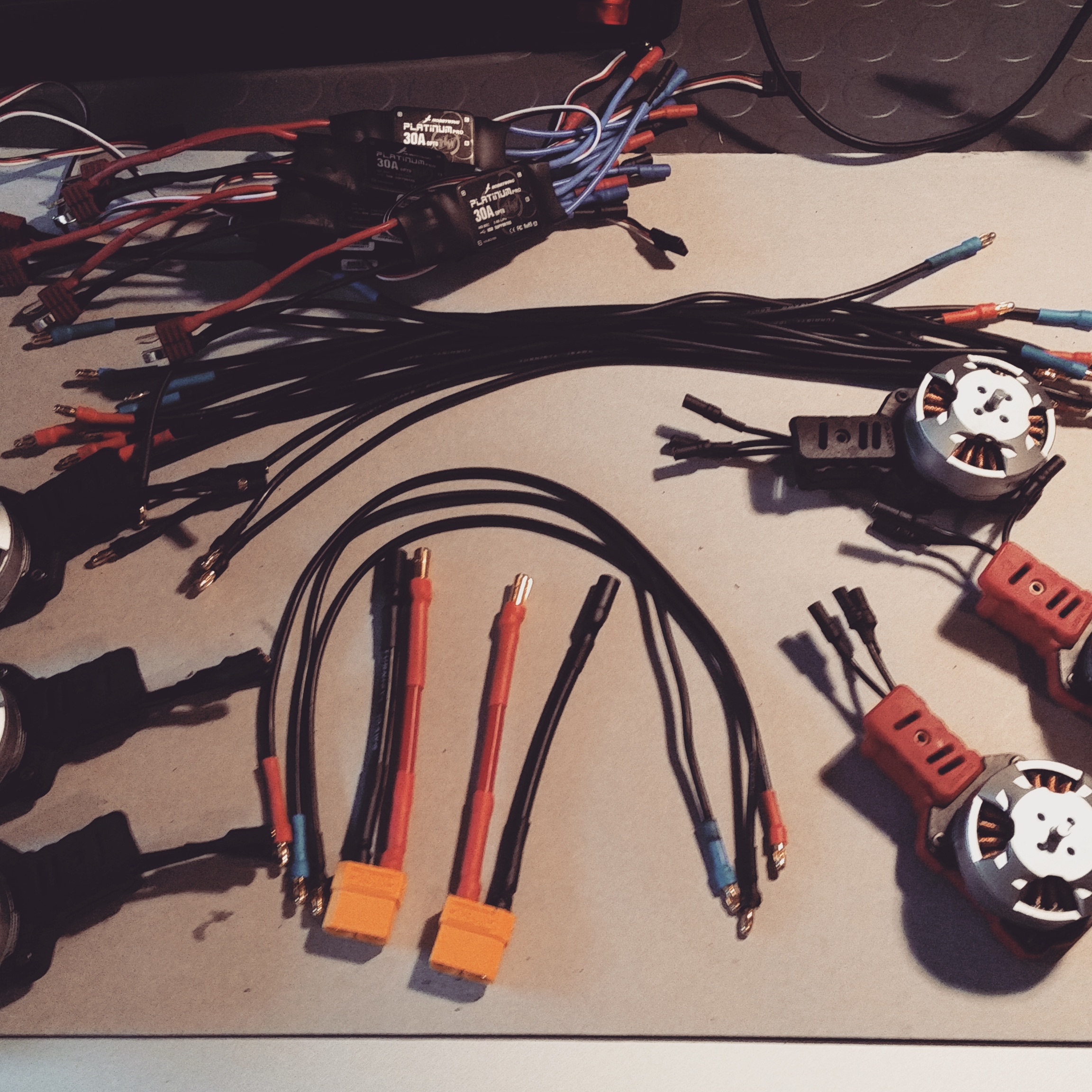
La fase di cablaggio continua.
Tutti connettori sono stati saldati. I motori sono stati montati sui propri supporti, agganciati attraverso le 3 viti (M3) equidistanti dal centro motore a 32mm.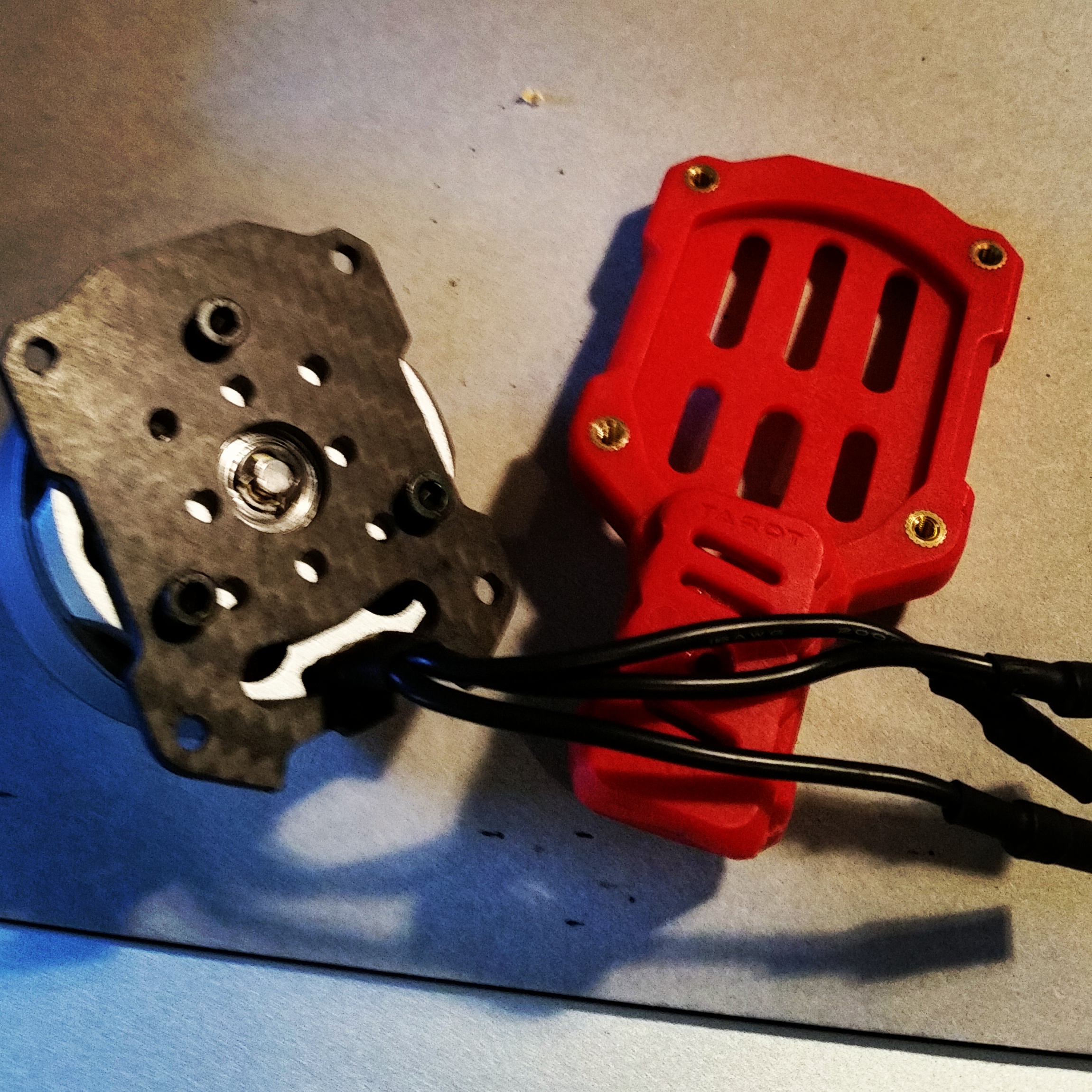 Tutte le viti dei rotori sono state assicurate con il liquido frenafiletti.
Tutte le viti dei rotori sono state assicurate con il liquido frenafiletti.

Dopo aver saldato i numerosi plug da 3,5”, arriva la parte più complessa: saldare i T-PLUG e i cavi di alimentazione ai connettori XT-90 e plug da 5”.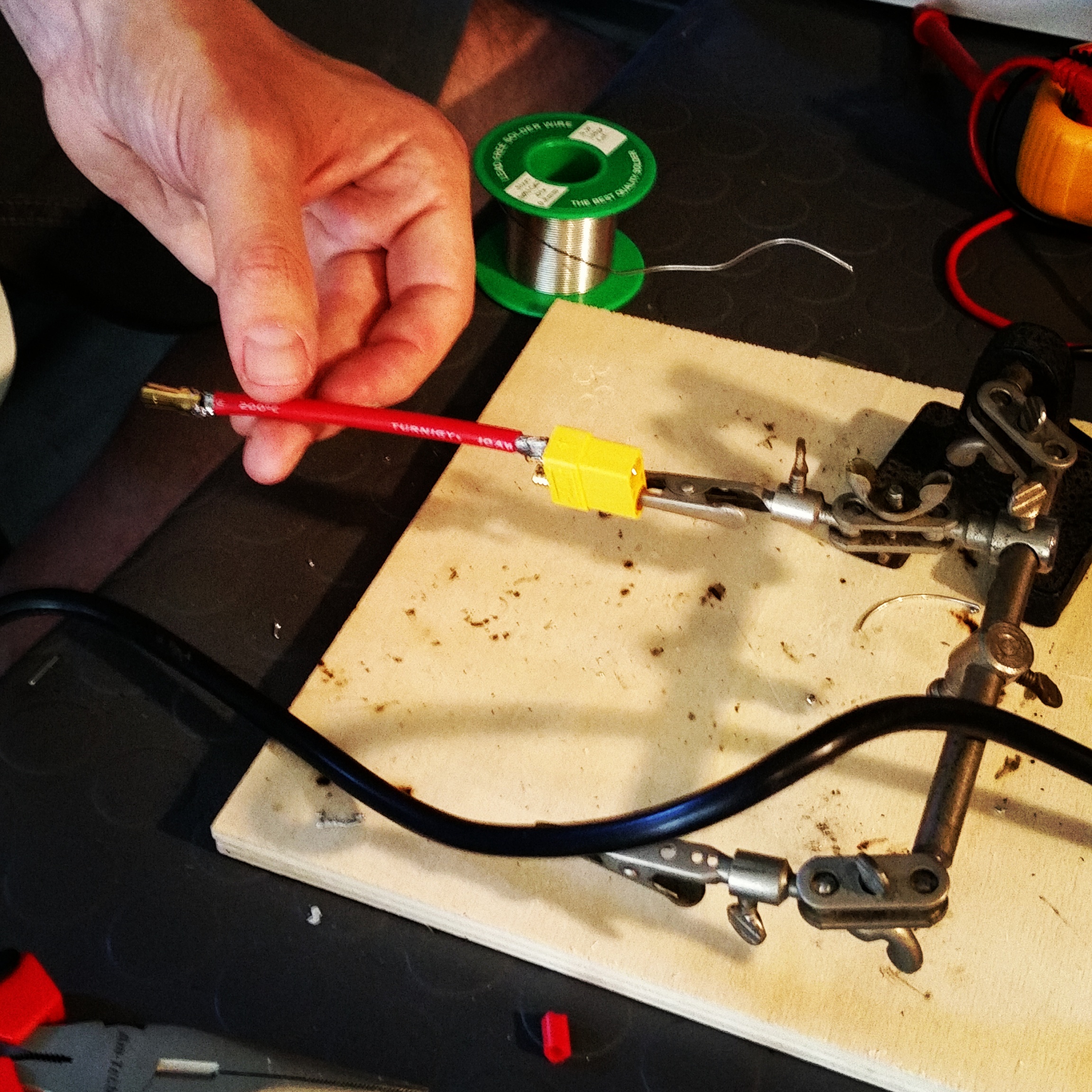
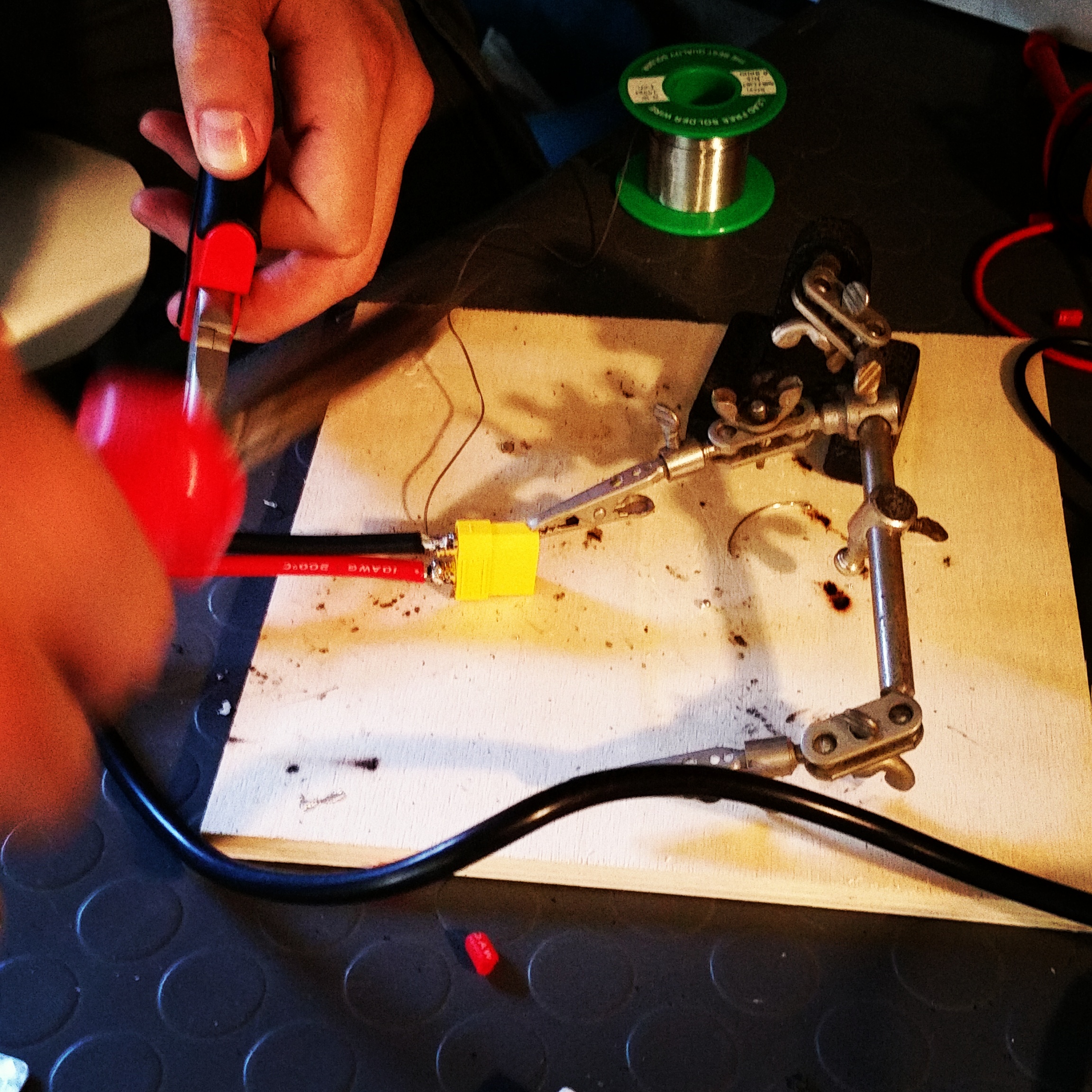
Un breve video che riprende la saldatura dei connettori T-PLUG agli ESC.
Ed ecco il lavoro compleatato.
Presto il collaudo e poi l’assemblaggio sul frame Tarot FY690s e il primo volo di test !