

Sembrava funzionare tutto bene. Le modalità di volo erano state impostate correttamente, qualcosa però faceva scattare la procedura di FailSafe … e il crash è assicurato 🙂
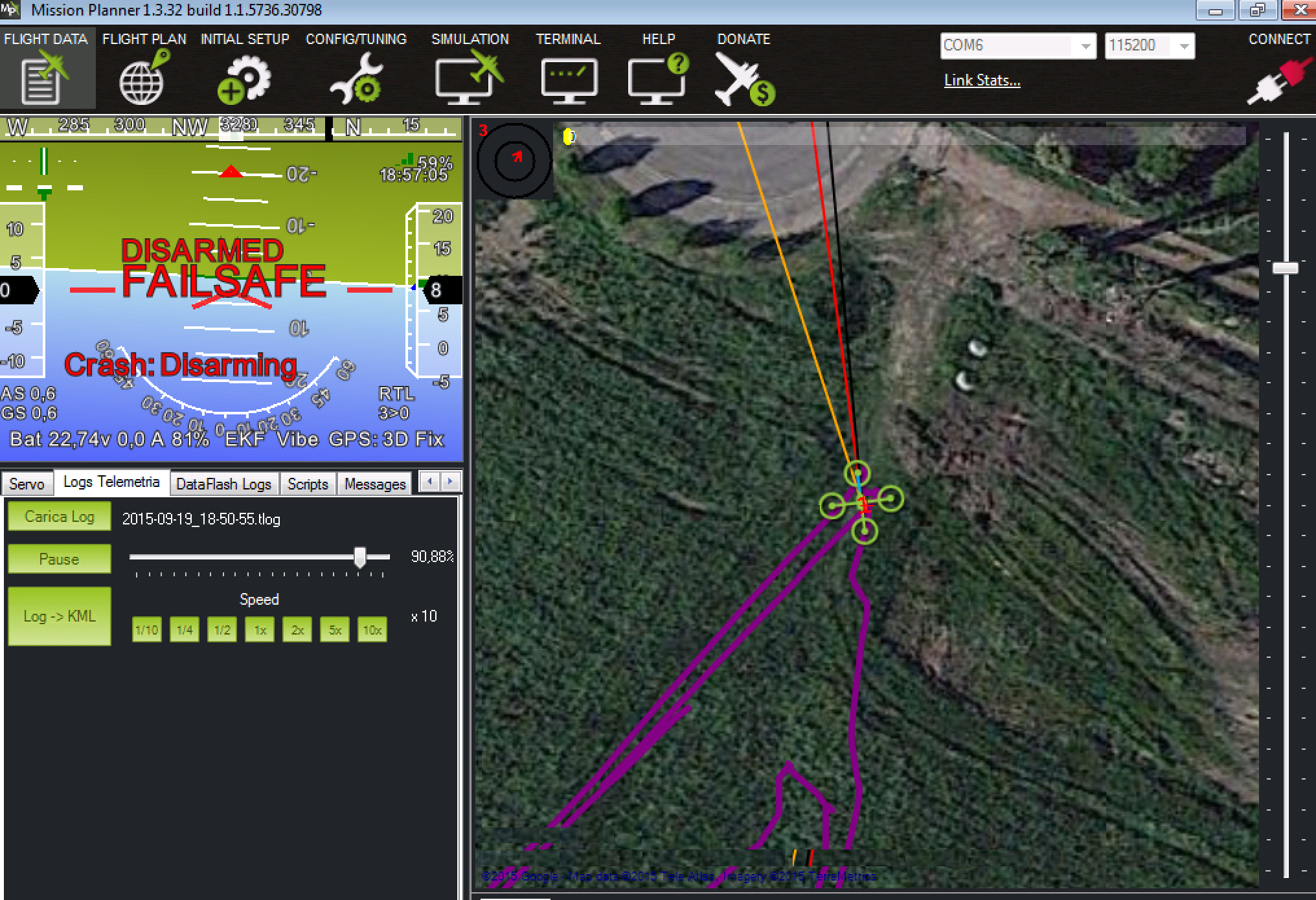
Nel tentativo di riportare a terra il drone nel minor tempo possibile, il frame si è appoggiato lateralmente. Atterraggio brusco. Iniziata la procedura di disarmo, il drone ha ripreso inavvertitamente potenza causando il capovolgimento a 180°: si era innescato nuovamente il FailSafe con la modalità di volo RTL. Qui l’ultimo fotogramma estratto durante l’analisi degli eventi grazie alla funzione Log PlayBack.
Fortunatamente il danno è stato limitato al supporto per il GPS (stampato in 3D).
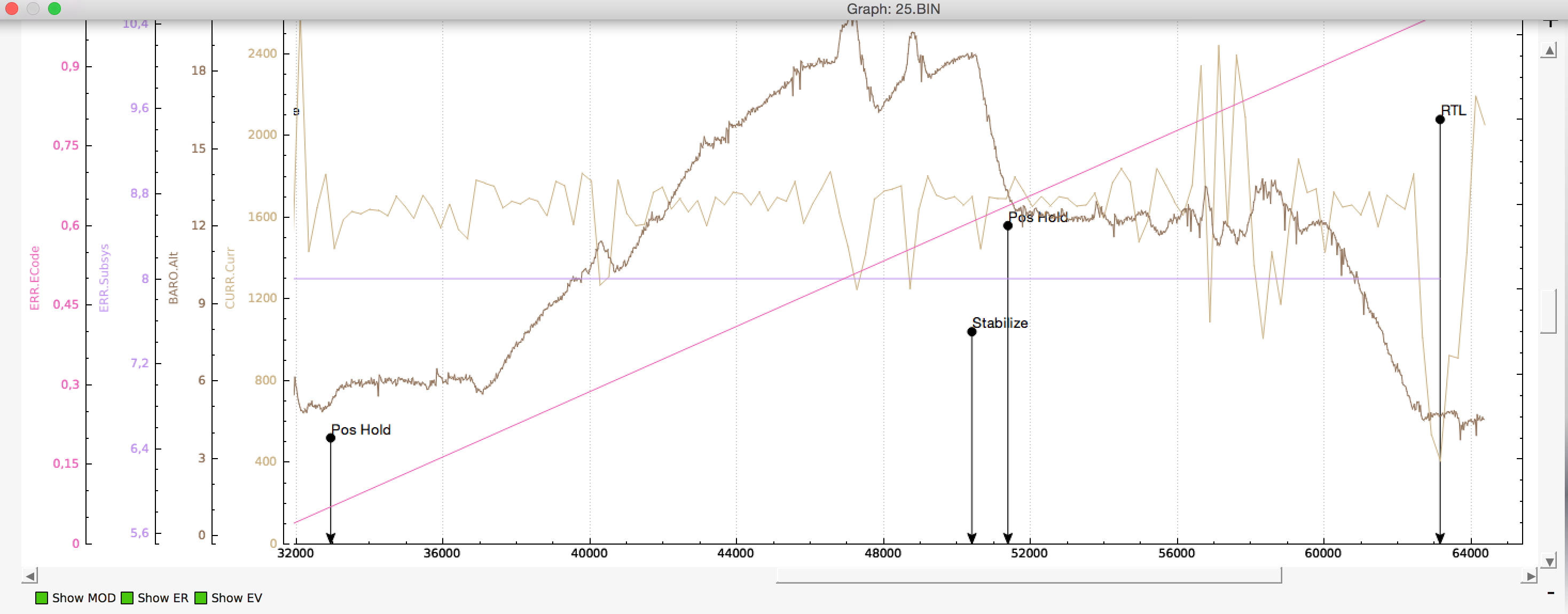
Analizzando il LOG forniti dalla Telemetria e dalla Flight Controller PX4 (rif. ArduPilot) è stato possibile individuare il trigger che richiamava il FailSafe. Le immagini di seguito mostrano l’analisi dei grafi: si possono notare il cambio di modalità di volo, e in particolare l’evento che ha determinato il FailSafe riconsociuto nella perdita di segnale della telemetria con la Ground Countrol. La GCS utilizzata nella missione è l’app per Android chiamata Andropilot con la telemetria della 3DRobotics.
8: GCS (Ground station) failsafe
ECode 1: updates from ground station joystick lost for at least 5 seconds
ECode 0: updates from ground station restored
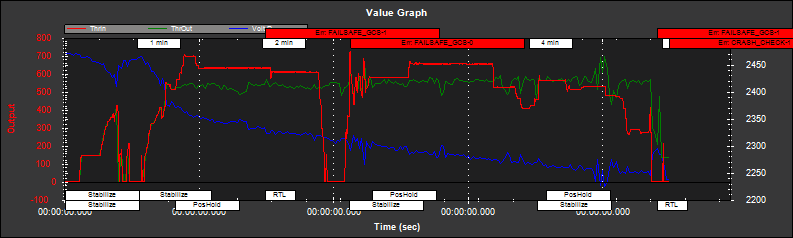 L’analisi degli eventi attraverso la rappresentazione dei grafi viene inoltre confermata dalla preview automatica data dal Mission Planner.
L’analisi degli eventi attraverso la rappresentazione dei grafi viene inoltre confermata dalla preview automatica data dal Mission Planner.
Ecco l’esito:
Log File C:/Users/Admin/AppData/Local/Temp/tmpB178.tmp.log
Size (kb) 4791.41796875
No of lines 64377
Duration 0:05:02
Vehicletype ArduCopter
Firmware Version V3.2.1
Firmware Hash 36b405fb
Hardware Type
Free Mem 0
Skipped Lines 0Test: Autotune = UNKNOWN – No ATUN log data
Test: Balance/Twist = GOOD –
Test: Brownout = FAIL – Truncated Log? Ends while armed at altitude 4.50m
Test: Compass = WARN – Moderate change in mag_field (27.14%)
Test: Dupe Log Data = GOOD –
Test: Empty = GOOD –
Test: Event/Failsafe = FAIL – ERRs found: CRASH GCS
Test: GPS = GOOD –
Test: IMU Mismatch = GOOD – (Mismatch: 0.41, WARN: 0.75, FAIL: 1.50)
Test: Parameters = GOOD –
Test: PM = FAIL – 26 slow loop lines found, max 9.75% on line 48001
Test: Pitch/Roll = FAIL – Roll (178.62, line 63775) > maximum lean angle (45.00)
Test: Thrust = GOOD –
Test: VCC = GOOD –
Nella prossima missione sperimenterò l’app Tower della 3DRobotics (rif. link).